
CAN o Controller Area Network es una tecnología de red en serie de alta velocidad semidúplex de dos cables. Básicamente se utiliza en la comunicación entre diferentes dispositivos en una región de radio bajo, como en un automóvil. Un protocolo CAN es un protocolo CSMA-CD / ASM o arbitrajes de detección de colisiones de acceso múltiple con detección de portadora en el protocolo de prioridad de mensajes. CSMA garantiza que cada nodo debe esperar un período determinado antes de enviar cualquier mensaje. La detección de colisiones garantiza que se evite la colisión seleccionando los mensajes según su prioridad prescrita.
Proporciona una velocidad de señalización de 125 kbps a 1 Mbps. Proporciona 2048 identificadores de mensajes diferentes.
Es estándar ISO-11898 y hace uso del modelo de interconexión de sistemas abiertos de 7 capas.
Historia:
Fue desarrollado por Robert Bosch en 1982 y lanzado oficialmente por la Sociedad de Ingenieros Automotrices de Detroit en 1986. El primer automóvil que integraba el bus CAN fue fabricado por Mercedes Benz en 1992.
Arquitectura ISO 11898:

Fuente de imagen - theremino
La arquitectura en capas consta de tres capas
- Capa de aplicación : Interactúa con el sistema operativo o la aplicación del dispositivo CAN.
- Capa de enlace de datos : Conecta los datos reales al protocolo en términos de envío, recepción y validación de datos.
- Capa fisica : Representa el hardware real.
La trama CAN estándar consta de los siguientes bits:
 La trama CAN estándar consta de los siguientes bits:
La trama CAN estándar consta de los siguientes bits:
- SOF- Inicio de Fr ame. El mensaje comienza desde este punto.
- Identificar : Decide la prioridad del mensaje. Cuanto menor sea el valor binario, mayor es la prioridad. Es de 11 bits.
- RTR - Solicitud de transmisión remota. Es dominante cuando se requiere información de otro nodo. Cada nodo recibe la solicitud, pero solo el nodo cuyo identificador coincide con el del mensaje es el nodo requerido. Cada nodo también recibe la respuesta.
- AQUÍ - Extensión de identificación única. Si es dominante, significa que se está transmitiendo un identificador CAN estándar sin extensión.
- R0 - bit reservado.
- DLC - Código de longitud de datos. Define la longitud de los datos que se envían. Es de 4 bits
- Datos - Se pueden transmitir hasta 64 bits de datos.
- CRC - Verificación de redundancia cíclica. Contiene la suma de comprobación (número de bits transmitidos) de los datos de la aplicación anterior para la detección de errores.
- POBRE DE MÍ - Reconocer. Es de 2 bits. Es dominante si se recibe un mensaje preciso.
- EOF - final del marco. Marca el final del marco de la lata y desactiva el relleno de bits.
- IFS - Espacio entre cuadros. Contiene el tiempo requerido por el controlador para mover un cuadro recibido correctamente a su posición adecuada.
5 Los diferentes tipos de mensajes son:
- Marco de datos : Consta de un campo arbitrario, un campo de datos, un campo CRC y los campos de reconocimiento.
- Marco remoto : Solicita la transmisión de datos desde otro nodo. Aquí el bit RTR es recesivo.
- Marco de error : Se transmite cuando se detecta un error.
- Marco de sobrecarga : Se utiliza para proporcionar un retraso entre mensajes. Se transmite cuando los nodos están demasiado ocupados.
- Marco válido : Un mensaje es válido si el campo EOF es recesivo. De lo contrario, el mensaje se vuelve a transmitir.
Capa física CAN:
Puede transportar

Fuente de imagen - digital.ni
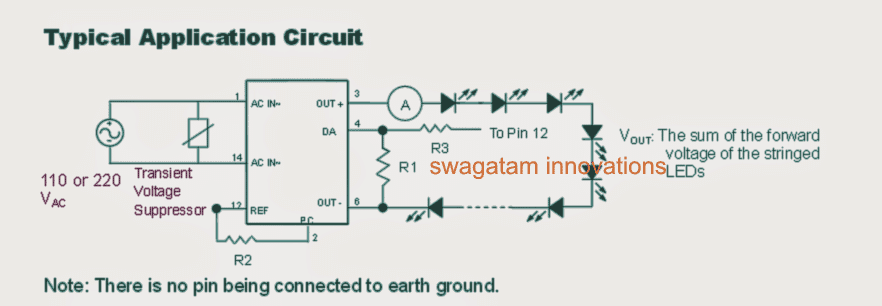
Consiste en un enlace en serie de dos cables, CAN_H y CAN_L, y sus niveles de voltaje entre sí determinan si se transmite un 1 o un 0. Esta es la señalización diferencial. La corriente que fluye en cada línea de señal es igual pero en dirección opuesta, lo que da como resultado un efecto de cancelación de campo que es clave para las bajas emisiones de ruido. Esto asegura una señalización diferencial equilibrada que reduce el acoplamiento de ruido y permite una alta tasa de transmisión a través de los cables. Normalmente, los hilos son cables de par trenzado con una longitud de bus de 40 my un máximo de 30 nodos. Es un cable apantallado o no apantallado con una impedancia característica de 120 ohmios.
PUEDE TRANSCEPTOR:

CAN para vehículos de Hugo Provencher. Los dos cables CANH y CANL están normalmente a 2,5 V determinados por los dos transistores y la fuente de voltaje de 2,5 V. Básicamente, la diferencia entre los dos cables siempre debe ser 0. El control del controlador determina el voltaje aplicado a los cables CANH y CANL. Cuando ambos transistores están conduciendo, la caída de voltaje en el 1S ttransistor y el diodo es de 1,5 V, lo que hace que el cable CANH suba hasta 3,5 V. La caída de voltaje en los 2Dakota del Nortetransistor y el diodo es de 1 V, lo que hace que el cable CANL baje a 1,5 V. Los diodos se utilizan para protección de alto voltaje. El receptor es un circuito discriminador que da una salida de 1 cuando las dos entradas CANH y CANL son iguales y una salida de 0 si las dos entradas son diferentes. El bloque dominante TXD se usa para protección de falla a tierra y el bloque de apagado térmico deshabilita el control del controlador si los diodos y los transistores se sobrecalientan.
Ventajas de CAN:
- Reduce el cableado ya que es un control distribuido y esto asegura mejorar el rendimiento del sistema.
- Muchos fabricantes de chips CAN proporcionaron la capa de enlace de datos y la capa física interconectadas con el chip y todo lo que el desarrollador de software necesita hacer es desarrollar la codificación de la aplicación.
- Proporciona la capacidad de trabajar en diferentes entornos eléctricos y garantiza una transmisión sin ruido.
- La congestión del tráfico se elimina ya que los mensajes se transmiten en función de su prioridad y permite que toda la red cumpla con las limitaciones de tiempo.
- Proporciona una transmisión sin errores, ya que cada nodo puede comprobar si hay errores durante la transmisión del mensaje y enviar la trama de error.
Ejemplo de trabajo CAN:
La red de área del controlador tiene amplias aplicaciones tanto en la industria como en los vehículos. Una de las principales aplicaciones está relacionada con la comunicación entre los diferentes dispositivos de un vehículo. Otro puede ser entre diferentes microcontroladores, supongamos para detectar una contraseña, utilizado para cumplir con cualquier requisito como abrir una puerta cerrada con una contraseña o encender una bombilla, etc.

Circuito de red del área del controlador
La aplicación básica consta de 3 microcontroladores que se comunican entre sí mediante dos cables como en una red CAN. El 1S tEl microcontrolador está interconectado con un teclado, el 2Dakota del Nortecon un LCD, y el tercero con un zumbador y un relé que opera una lámpara. Cuando se ingresa una contraseña en el teclado, el 2Dakota del NorteEl microcontrolador actúa como receptor y recibe el mensaje transmitido bit a bit del 1S ttransmisor y muestra el mensaje en la pantalla LCD. Cuando se transmite todo el mensaje, el 2Dakota del NorteEl microcontrolador realiza la verificación y si la contraseña es incorrecta, envía una señal a los 3rdEl microcontrolador, que a su vez envía un zumbador, se enciende con esta señal. Cuando la contraseña es correcta, el 3rdmicrocontrolador enciende el relé que a su vez enciende la lámpara.




{kind=link}
{kind=link}