Con el desarrollo de tecnologías especialmente en tecnología robótica, los robots son predominantes en muchas de las aplicaciones. Algunos de ellos son de un tipo de alto riesgo y áreas peligrosas. Las aplicaciones militares y de campo de batalla ahora están aumentando el uso de robots en algunas tareas cruciales y complicadas. En uno de mis artículos, describí el uso de Robots como espía en operaciones militares. Ahora bien, ¿qué pasa si es necesario defender el vehículo robótico o un ataque del robot? Ahí es donde surge la necesidad de un robot integrado con un mecanismo de ataque. Un ejemplo de ello es el vehículo robótico con una pistola LÁSER.

Vehículo robótico controlado por RF con disposición de rayo láser
Dicho robot se utiliza básicamente en operaciones militares y también por la policía de tráfico para detectar la velocidad de los vehículos en movimiento.
Antes de pasar a los detalles acerca de los robots con pistolas láser, comprendamos rápidamente el LASER como arma.
Un rayo LÁSER (amplificación de luz por emisión de estimulación) es una luz unidireccional fuertemente enfocada a diferencia de la de una bombilla simple. Consiste en valles y crestas sincronizados, es decir, las olas no interfieren entre sí. Esto produce una luz fuertemente enfocada de muy alta potencia del orden de 1000 a 1 millón de veces mayor que una bombilla típica. Es un dispositivo que controla la emisión y absorción de fotones bombeando cantidades suficientes de energía. En esto, la fuente de fotones se amplifica en un haz de luz. La longitud de onda de estos láseres varía en diferentes espectros como visible, infrarrojo y ultravioleta.
El principio detrás del LÁSER gira en torno a tres cosas: absorción, emisión espontánea y emisión estimulada. Una cantidad adecuada de energía del fotón interactúa con el átomo, lo que hace que el átomo salte de un estado de menor energía a un estado de mayor energía. Este átomo vuelve al estado de menor energía emitiendo un fotón llamado emisión espontánea. En la emisión estimulada se produce la liberación de energía del átomo por medios artificiales. por lo que el fotón interactúa con el átomo excitado, tiene la misma energía y polarización que el fotón incidente.
Ahora echemos un vistazo a las partes de hardware del robot.
- Base: La base de un robot de este tipo puede ser cualquier cuerpo cúbico con ruedas unidas para su movimiento.
- DC Motor: El robot consta de dos motores de CC accionados por los controladores del motor y proporciona el movimiento requerido al robot.
- Unidad de control: El movimiento del robot se controla mediante un módulo de comunicación RF. El transmisor consta de botones pulsadores, microcontroladores, un decodificador y un transmisor de RF, mientras que la unidad receptora integrada en el robot consta de un codificador y un módulo receptor de RF para controlar el movimiento robótico .
- Una pistola LÁSER: Una pistola LÁSER está montada en el robot que realiza la tarea principal del robot.
Un adelanto del funcionamiento del robot
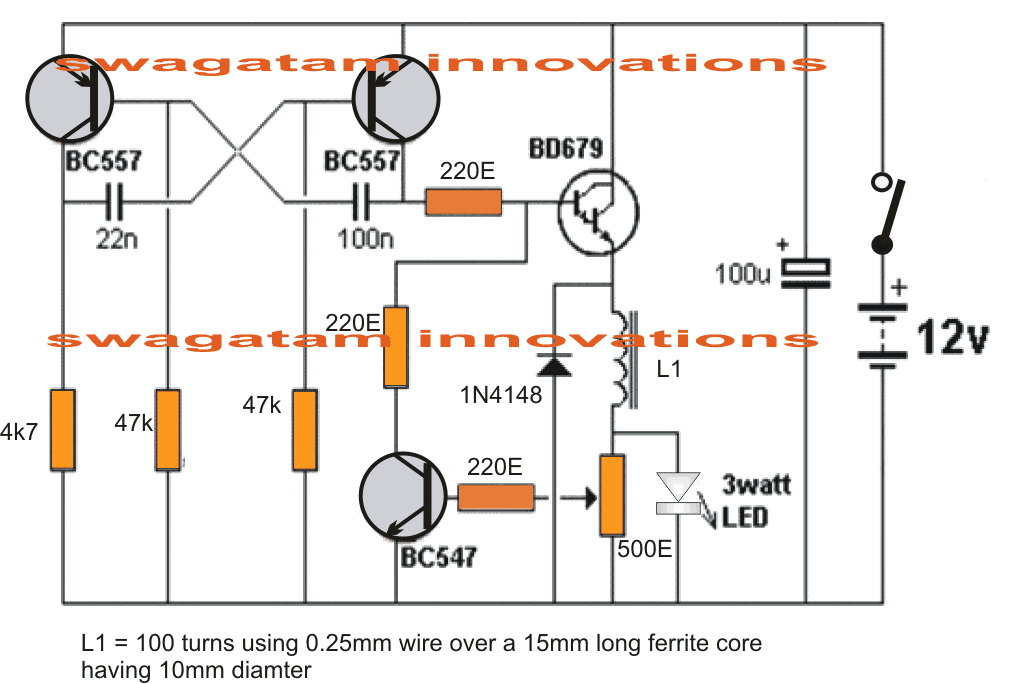
El robot, mientras se mueve en la dirección requerida, dispara un fuerte haz de luz desde la pistola LÁSER que puede dañar el objetivo o simplemente producir un punto para detectar el objetivo. El LÁSER debe funcionar con algunas fuentes de energía. En un diseño de prototipo simple que usa un lápiz láser básico, el dispositivo es impulsado por un transistor que actúa como un interruptor. El transistor recibe la señal de lógica baja del microcontrolador y está en condición de apagado, lo que hace que el módulo LÁSER esté conectado directamente a la fuente de alimentación de 5 V.

Pistola láser impulsada por transistor que funciona como inversor
Controlando el Robot
Para controlar el movimiento del robot, es necesario controlar el funcionamiento de los motores. Esto se puede hacer usando una operación controlada por RF de los controladores del motor. Los comandos se transmiten utilizando un transmisor de RF a una unidad de distancia de unos 200 metros y son recibidos por el receptor de RF para impulsar los motores.
La unidad transmisora consta de varios botones que actúan como interruptores de comando para mover el robot en cualquier dirección deseada. Los botones pulsadores están interconectados con el microcontrolador, que está programado para enviar datos en forma paralela en función de la entrada del botón pulsador, al codificador. El codificador convierte estos datos en paralelo en forma serial y estos datos en serie se transmiten utilizando el módulo transmisor de RF a través de una antena.

Diagrama de bloques que muestra la sección del transmisor
La unidad receptora consta de un módulo receptor de RF que recibe la señal modulada y la demodula. El decodificador recibe la señal demodulada en serie y la convierte en forma paralela. El microcontrolador recibe las señales y controla el controlador del motor en consecuencia. El controlador de motor utilizado en LM293D que puede controlar 2 motores a la vez.

Diagrama de bloques que muestra la sección del receptor
Por lo tanto, utilizando la comunicación por RF podemos controlar el robot.
En las descripciones anteriores, he dado una breve idea sobre un prototipo simple de un vehículo robótico con un rayo LÁSER. En aplicaciones de la vida real, se utilizan normalmente sistemas de comunicación de largo alcance como GSM o DTMF para controlar el robot desde lugares remotos.
3 aplicaciones de vehículos robóticos con pistola láser:
- Detección de objetivos : El vehículo robótico puede usar el rayo LÁSER para crear un punto en el objetivo, de modo que sea fácilmente visible y pueda ser objetivo. Un ejemplo es el LÁSER aéreo.
- Destrucción de objetivos : Un fuerte Rayo laser del orden de la frecuencia de 95GHz puede causar una sensación de ardor en el cuerpo humano ya que penetra en la piel en 1/64thde una pulgada y la energía del rayo puede calentar las moléculas de agua en el cuerpo. Un ejemplo es el Active Denial System desarrollado por EE. UU.
- Buscador de rango objetivo y detección de velocidad : El rayo LÁSER del vehículo robótico se puede utilizar para encontrar el alcance del objetivo mediante el principio de reflexión de la luz LÁSER y también se puede calcular la velocidad del objetivo una vez que podamos obtener el alcance.
Así que ahora tenemos una breve idea de que los robots usaron un detector y destructor de objetivos. ¿Tiene algún uso para el público normal además del militar? Piensa y responde.