La interconexión del motor de CC con el microcontrolador es un concepto muy importante en muchas aplicaciones industriales y robóticas. Al conectar el motor de CC al microcontrolador, podemos controlar la dirección del motor, controlar la velocidad del motor. Este artículo te describe, Control de velocidad del motor de CC con microcontrolador 8051 con la ayuda del controlador Bluetooth Android. El diagrama de bloques se muestra a continuación.

Diagrama de bloques de control de velocidad del motor de CC mediante la aplicación Android
Control de velocidad del motor de CC por aplicación de Android
Control de velocidad del motor de CC mediante un dispositivo móvil Android tiene muchas aplicaciones como aplicaciones industriales, escaleras mecánicas, ascensores, aplicaciones robóticas y aplicaciones de sistemas de seguridad. El usuario debe instalar una aplicación de Android en su teléfono inteligente Android.
El usuario puede enviar instrucciones para controlar la velocidad del motor de CC. La comunicación inalámbrica Bluetooth se utiliza para enviar comandos al usuario y al controlador. Los principales componentes de hardware del circuito son el microcontrolador 8051, el controlador de motor L293D IC, el motor de CC, el módulo Bluetooth y el teléfono inteligente Android.
Consulte este enlace para saber más sobre Historia y conceptos básicos del microcontrolador 8051
La corriente de salida máxima del pin del microcontrolador es de 15 mA a 5 V, pero no hace que el motor de CC funcione e incluso la EMF (fuerza electromotriz) que produce el motor puede dañar el microcontrolador.
Por lo tanto, no es digno de conectar el motor de CC directamente al microcontrolador. Por lo tanto, el circuito del controlador del motor (L293D IC) se utiliza para interfaz motor DC y el microcontrolador .
Controlador de motor (L293D)
L293D es un circuito integrado (IC) de controlador de motor de puente H dual. Los controladores de motor actúan como amplificadores de corriente, ya que toman una señal de control de baja corriente y proporcionan una señal de corriente más alta. Esta señal de corriente más alta se utiliza para impulsar los motores. L293D contiene dos circuitos de controlador de puente H incorporados . En su modo de funcionamiento común, dos motores de CC pueden accionarse simultáneamente, tanto en dirección de avance como de retroceso. Las operaciones del motor de dos motores se pueden controlar mediante la lógica de entrada en los pines 2 y 7 y 10 y 15.
La lógica de entrada 00 u 11 detendrá el motor correspondiente. El Logic 01 y 10 lo rotarán en sentido horario y antihorario, respectivamente. Los pines de habilitación 1 y 9 (correspondientes a los dos motores) deben estar altos para que los motores comiencen a funcionar. Cuando una entrada de habilitación es alta, se habilita el controlador asociado.
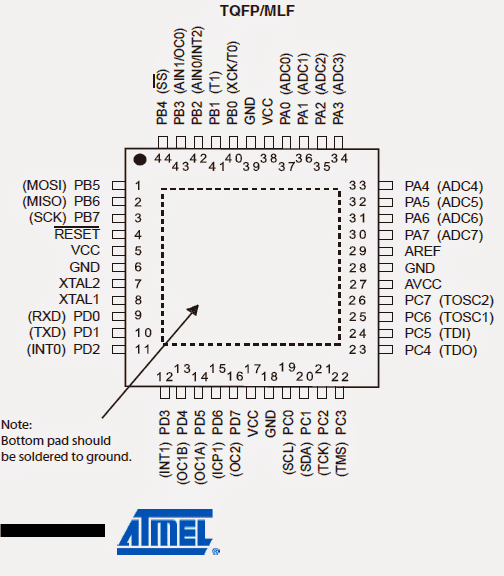
Como resultado, las salidas se activan y funcionan en fase con sus entradas. De manera similar, cuando la entrada de habilitación es baja, ese controlador está deshabilitado y sus salidas están apagadas y en el estado de alta impedancia. El diagrama de pines y la estructura interna de L293D IC se muestran a continuación.

Diagrama de clavijas y estructura interna de L293D IC
¿Qué es Android?
los Sistema operativo Android funciona basado en Linux, está diseñado principalmente para dispositivos móviles con pantalla táctil, como teléfonos inteligentes y tabletas. Uno de los sistemas operativos móviles más utilizados en estos días es Android. El Android es un software que se fundó en Palo Alto de California en 2003.

Móvil Android
Android es un potente sistema operativo y admite una gran cantidad de aplicaciones en teléfonos inteligentes. Estas aplicaciones son más cómodas y avanzadas para los usuarios. El hardware que admite el software de Android se basa en Plataforma de arquitectura ARM .
Android es un sistema operativo de código abierto, lo que significa que es gratuito y cualquiera puede usarlo. Android tiene millones de aplicaciones disponibles que pueden ayudarlo a administrar su vida de una manera u otra y está disponible a bajo costo en el mercado, por eso Android es muy popular.
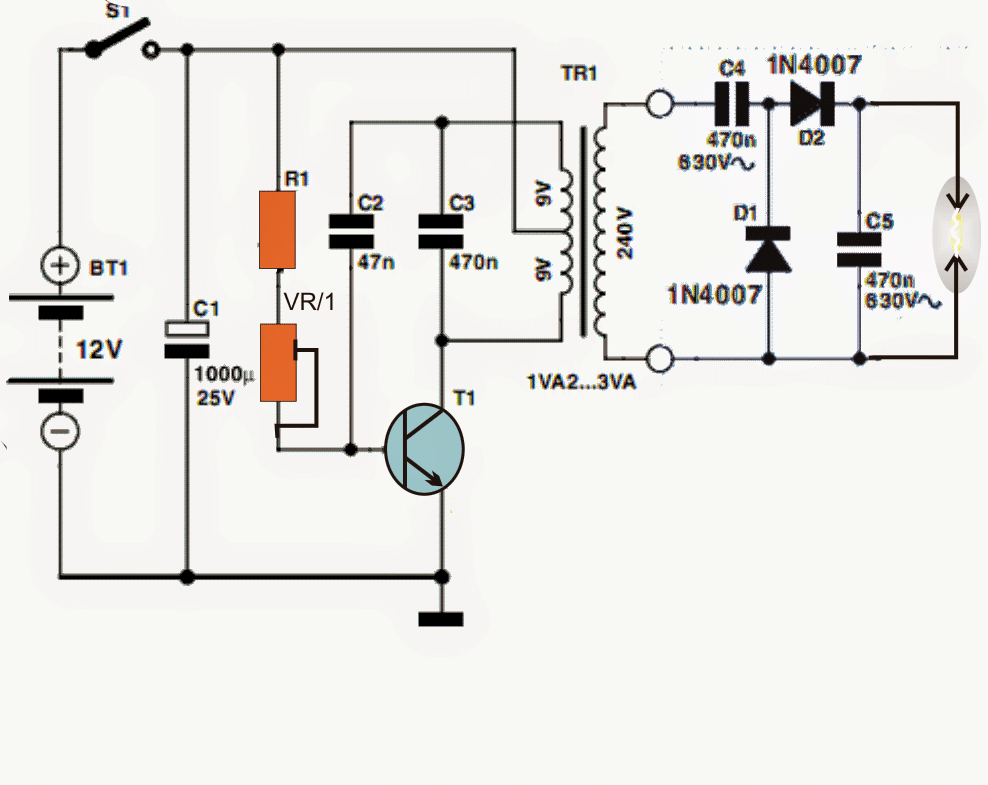
Explicación del diagrama esquemático del control de velocidad del motor de CC
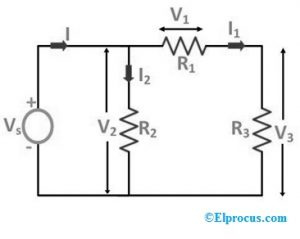
A continuación se proporciona el diagrama esquemático del circuito de control de velocidad del motor de CC y la explicación del funcionamiento.

Diagrama esquemático
El circuito utiliza una fuente de alimentación estándar que consta de un transformador reductor de 230V a 12V y 4 diodos que forman un puente rectificador que entrega CC pulsante que luego se filtra mediante un capacitor electrolítico de aproximadamente 470 µF a 1000 µF.
Dado que la CC filtrada no está regulada, el IC LM7805 se utiliza para obtener una constante de 5 V CC en su pin no 3. Los 5 V CC regulados se filtran aún más mediante un pequeño condensador electrolítico de 10 µF para cualquier ruido generado por el circuito.
La señal de control del dispositivo Android se enviará a través de Bluetooth. Esta señal se comunicará con el microcontrolador con la ayuda del transmisor y receptor de ambos dispositivos. Esta señal estará representada por una sola letra que controla la velocidad y dirección del motor.
¿Cómo controlar la velocidad del motor de CC? En este proyecto, el principio de funcionamiento principal es que los pulsos PWM se generan desde el microcontrolador programado para habilitar el pin 1 de L293D para aumentar y disminuir el ciclo de trabajo de los pulsos. Estos pulsos de trabajo pueden conducir al motor de CC en la dirección correcta con una velocidad específica.
Modulación de ancho de pulso
Modulación de ancho de pulso se logra a partir de la salida de un microcontrolador que está debidamente programado para tomar los datos así recibidos por un dispositivo Bluetooth conectado a él. Un módulo Bluetooth está debidamente interconectado con el microcontrolador para el flujo de datos bidireccional mientras se ejecuta el programa para desarrollar los pulsos PWM.
La aplicación de Android de cualquier teléfono inteligente se comunica a través del Bluetooth incorporado del teléfono al módulo Bluetooth que está conectado al microcontrolador para las operaciones necesarias. El ciclo de trabajo de modulación de ancho de pulso se muestra a continuación.

Ciclo de trabajo PWM
El botón táctil hacia arriba en el teléfono inteligente que ejecuta el programa Android se utiliza para aumentar el ciclo de trabajo a tiempo del PWM, mientras que el botón táctil hacia abajo es para reducir el ciclo de trabajo.

Aplicación de Android para el control de velocidad del motor de CC
los DC motor se ejecuta a través del IC del controlador del motor L293D con un ciclo de trabajo variable aplicado para permitir que el pin-1 de L293D se alimente desde el microcontrolador para el control de velocidad. Los pines de datos LCD conectados al microcontrolador para mostrar el porcentaje de velocidad a la que está funcionando el motor.
Por lo tanto, el control de velocidad del motor de CC mediante la aplicación de Android es una forma rentable, práctica y más segura de ahorrar energía. Se puede utilizar una técnica simple PWM (Modulación de ancho de pulso) para controlar la velocidad del motor. El ciclo de trabajo de la onda controla su velocidad. Al intercambiar los puertos de salida, cambiará efectivamente la dirección del motor.
Además, cualquier consulta con respecto a este artículo, dé sus valiosas sugerencias comentando en la sección de comentarios a continuación. Aquí hay una pregunta para usted, ¿cuáles son las aplicaciones de la interfaz de motor de CC a un microcontrolador?